
Shallow-Medium Multibeam Echosounders
Shallow-Medium Multibeam Echosounders
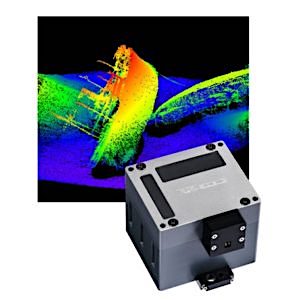
R2Sonic 2020
Highly portable, entry level multibeam sonar: small, easy-to-use, remarkable performance.
Selectable Frequencies: 200kHz - 450kHz, Option 700kHz
Beamwidth: 1° x 1° at 700kHz, 2° x 2° at 400kHz, 4° x 4° at 200kHz
User-Selectable Swath Sector in Real-Time: 10° to 130°
![]()

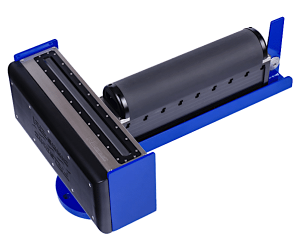
R2Sonic 2022
Small form factor multibeam sonar, ideal for remote vehicle and small boat operations, with a range of up to 400m+.
Selectable Frequencies: 170kHz - 450kHz, Option 700kHz
Beamwidth: 0.6° x 0.6° at 700kHz, 0.9° x 0.9° at 450kHz, 2° x 2° at 200kHz
User-Selectable Swath Sector in Real-Time: 10° to 160°
R2Sonic 2024
The world’s first broadband-wideband high resolution multibeam sonar for unprecedented system versatility, productivity, and performance (400m+).
Selectable Frequencies: 170kHz - 450kHz, Option 700kHz
Beamwidth: 0.3° x 0.6° at 700kHz, 0.45° x 0.9° at 450kHz, 1° x 2° at 200kHz
User-Selectable Swath Sector in Real-Time: 10° to 160°

R2Sonic 2026
The unique option to survey at 90kHz/100kHz operating frequency for extended range coverage.
Selectable Frequencies: 170kHz - 450kHz, Option 90kHz & 100kHz
Beamwidth: 0.45° x 0.45° at 450kHz
User-Selectable Swath Sector in Real-Time: 10° to 160°
Sounding Depth: 800m+